Projet de Terminale
En Terminale STI2D nous avons, en groupe, choisir un système et l'améliorer. Ce projet était évalué au baccalauréat coefficient 12.
En Terminale STI2D nous avons, en groupe, choisir un système et l'améliorer. Ce projet était évalué au baccalauréat coefficient 12.
Pour ce projet nous avons choisi d'ajouter trois systèmes sur un vélo grâce aux cartes type Arduino :

Dans ce projet, je me suis occupé du compteur de vitesse avec son affichage.
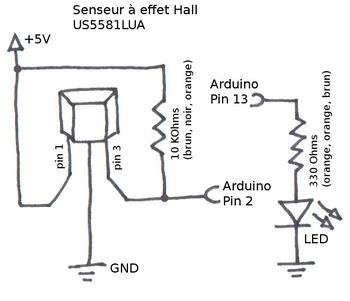
Pour le compteur de vitesse j'ai utilisé un capteur à effet Hall (capteur de champ magnétique).
J'ai fixé le capteur sur la fourche et un aimant sur la roue ce qui me permet de détecter un tour de roue.
À chaque tour de roue je lance un chronomètre pour obtenir le temps entre deux tours de roue.
Ensuite je calcule la vitesse grâce à la formule :
périmètre de la roue / temps entre deux tours de roue .
Pour l'affichage, j'ai utilisé un écran OLED 0.96 pouce fixé sur le guidon avec une connexion en I2C.
Pour le micro-contrôleur j'ai utilisé un ESP8266 car pour l'envoi des données de pollution sur le serveur nous utilisons la puce WI-FI intégrée mais nous aurions aussi pu utiliser une carte Arduino complétée d'un module WI-FI (plus compliqué à mettre en place).
Voicie une vidéo du projet en fonctionnement. Je simule le tours de roue en passant l'aimant devant le capteur.
Pour réaliser le compteur de vitesse nous avons besoin :


// ----------========== Partie déclarative ===========----------
// -----===== calcul du délai =====-----
float delais;
float temps;
int tempoV = 0;
// -----===== calcul de la vitesse =====-----
int etat_capt = 0;
float vitesse;
float moyV = 0;
float sommeV = 0;
int compteur = 1;
int arreter = 0;
// -----===== capteur =====-----
int capteur_hall = D4; //capteur sur la pin digital 8
// -----===== roue =====-----
const float pi = 3.14; //pi est egale a 3.14
const int Droue = 24; //le diamètre de la roue en pouce
float Proue; //le périmètre de la roue
// ----------========== Partie SETUP ===========----------
void setup(){
pinMode(capteur_hall, INPUT); //le capteur en entrée
Serial.begin(115200);
// -----===== calcul périmètre roue =====-----
Proue = ((Droue * 2.54) * pi)/100; //périmètre de la roue en m
Serial.print("périmetre de la roue : ");
Serial.print(Proue);
Serial.println(" mètre");
}
// ----------========== Partie code (LOOP) ===========----------
void loop(){
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détécter l'aimant
delais = millis() - temps; //temps en ms
Serial.println(delais);
temps = millis();
etat_capt = 1;
arreter = 0;
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
// -----===== calcul de la moyenne =====-----
sommeV = sommeV + vitesse;
moyV = sommeV / compteur;
compteur++;
// -----===== affichage vitesse =====-----
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moy : ");
Serial.print(moyV);
Serial.println(" en km/h");
}
}
// ---== en cas d'arrêt ==---
else{
etat_capt = 0;
if(arreter == 0){
if((millis() - temps) >= 5000){
Serial.println ("vitesse : 0km/h ");
arreter = 1; }
}
}
}
// -------======== Déclaration de bibliothèque ========-------
#include
#include
// adresse de l'écran OLED
#define OLED_ADDR 0x3C
Adafruit_SSD1306 display(-1);
#if (SSD1306_LCDHEIGHT != 64)
//#error("largeur incorrect, fix Adafruit_SSD1306.h!");
#endif
void setup() {
// Initialisation de l'écran
display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDR);
display.clearDisplay();
display.display();
display.setTextSize(2); //taille du texte à 1
display.setTextColor(WHITE); //couleur blanche
}
void loop() {
display.clearDisplay(); //on efface l'écran
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
display.print("Hello world"); //on affiche "Hello world"
display.display(); //update de l'écran
}
// -------======== Déclaration de bibliothèque ========-------
#include
#include
// adresse de l'écran OLED
#define OLED_ADDR 0x3C
Adafruit_SSD1306 display(-1);
#if (SSD1306_LCDHEIGHT != 64)
//#error("largeur incorrect, fix Adafruit_SSD1306.h!");
#endif
// -------======== Déclaration de Variable/capteur ========-------
// -----===== calcul delais =====-----
float delais;
float temps;
// -----===== calcul vitesse =====-----
int etat_capt = 0;
float vitesse;
float moyV = 0;
float Vmax = 0;
float sommeV = 0;
int compteur = 1;
int arreter = 0;
int nbr_tour = 0;
float distance = 0;
// -----===== Bouton =====-----
int BP = D3; //bouton sur la pin digital 7
int Etat_BP = 1; //variable pour savoir sur quel écran on est
int nbr_ecran = 5; //pour définir le nombre d'écran
int affichage = 0;
// -----===== capteur =====-----
int capteur_hall = D4; //capteur sur la pin digital 8
// -----===== roue =====-----
const float pi = 3.14; //pi est egal a 3.14
const int Droue = 15; //le diamètre de la roue en pouce
float Proue; //le périmètre de la roue
void setup() {
// ----------------======================= SET UP =======================---------------
Serial.begin(115200); //lancement du moniteur série à 115 200 baud
Serial.println(" ----- SET UP -----");
// initialisation de l'écran
display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDR);
display.clearDisplay();
display.display();
display.setTextSize(2); //taille du texte à 1
display.setTextColor(WHITE); //couleur blanche
// afficher un pixel à chaque coin de l'écran
/*display.drawPixel(0, 0, WHITE);
display.drawPixel(127, 0, WHITE);
display.drawPixel(0, 32, WHITE);
display.drawPixel(127, 32, WHITE);*/
pinMode(capteur_hall, INPUT); //le capteur est en entrée
pinMode(BP, INPUT); //le bouton est en entrée
// -----===== calcul périmètre roue =====-----
Proue = ((Droue * 2.54) * pi)/100; //périmètre de la roue en m
Serial.print("périmetre de la roue : "); //affichage dans le moniteur série
Serial.print(Proue);
Serial.println(" mètre");
Serial.println(" ----- fin SET UP ----- ");
}
void loop() {
// ----------------======================= LOOP =======================----------------
// -----===== changement d'écran =====-----
if(Etat_BP <= nbr_ecran){
if(digitalRead(BP) == 0){
Etat_BP++;
//Serial.print("Etat bouton ");
//Serial.println(Etat_BP);
delay(250);
}}
else{
Etat_BP = 1;
}
// --------------------==================== Ecran 1 : vitesse ====================--------------------
if(Etat_BP == 1){
if (affichage == 0){
Serial.println(" --------------- ");
Serial.println("écran 1 : vitesse actuelle");
affichage = 1;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détecter l'entrée de l'aimant
delais = millis() - temps; //délai entre 2 tours en ms
//Serial.println(delais); //affichage du temps en ms
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on met la variable "arrêter" à 0
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
// -----===== calcul de la moyenne =====-----
sommeV = sommeV + vitesse; //on calcule la somme de toutes les vitesses
moyV = sommeV / compteur; //et on divise par la somme des tours de roue
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse dans le moniteur série =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moyenne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
// -----===== affichage écran =====-----
display.clearDisplay(); //on efface l'écran
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
if(vitesse >=10){
display.print(vitesse); //on affiche la vitesse
display.print(" km/h"); //en km/h
}
if(vitesse < 10){
display.print(vitesse); //on affiche la vitesse
display.print(" km/h"); //en km/h
}
display.display(); //update de l'écran
}
}
// --=== si le capteur ne détecte pas l'aimant (la roue ne tourne pas) ===--
else{
//Serial.println("capteur plus detecté");
etat_capt = 0; //on met la variable pour détecter l'entrée de l'aimant à 0
if(arreter == 0){ //si on n'est pas déjà arrêté
if((millis() - temps) >= 3000){ //si le capteur n'a rien détecté depuis x secondes
Serial.println ("vitesse : 0km/h ");
arreter = 1; //on passe à arrêter
vitesse = 0; //et on met la vitesse à 0
// --=== affiche la vitesse à l'arrêt ===--
display.clearDisplay();
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
display.print(vitesse);
display.print(" km/h");
display.display();
}
}
}
}
// --------------------=================== Ecran 2 : vitesse moyenne ====================--------------------
if(Etat_BP == 2){
if (affichage == 1){
Serial.println(" --------------- ");
Serial.println("écran 2 : vitesse moyenne");
affichage = 0;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //Pour détécter l'entrée de l'aimant
delais = millis() - temps; //temps en ms
//Serial.println(delais);
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on passe à "en mouvement"
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// ---==== calcul distance ====---
distance = nbr_tour * Proue; //la distance en mètre
distance = distance / 1000; //la distance en km
// -----===== calcul de la moyenne =====-----
moyV = distance / millis();
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moynne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
// -----===== affichage écran =====-----
display.clearDisplay(); //on efface l'écran
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
if(moyV >=10){
display.print(moyV); //on affiche la vitesse
display.print(" Vmoy"); //en km/h
}
if(moyV < 10){
display.print(moyV); //on affiche la vitesse
display.print(" Vmoy"); //en km/h
}
display.display(); //update de l'écran
}
}
// --=== si le capteur ne détecte pas l'aimant ===--
else{
etat_capt = 0; //on met la variable pour détecter l'entrée de l'aimant à 0
}
}
// --------------------==================== Ecran 3 : vitesse max ====================--------------------
if(Etat_BP == 3){
if(affichage == 0){
Serial.println(" --------------- ");
Serial.println("écran 3 : vitesse max");
affichage = 1;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détécter l'entrée de l'aimant
delais = millis() - temps; //délai entre 2 tours en ms
//Serial.println(delais); //affichage temps en ms
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on passe à "en mouvement"
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
/*Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en m/s");*/
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse dans le moniteur série =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moyenne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
// -----===== affichage écran =====-----
display.clearDisplay(); //on efface l'écran
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
if(Vmax >=10){
display.print(Vmax); //on affiche la vitesse
display.print(" VMax"); //en km/h
}
if(Vmax < 10){
display.print(Vmax); //on affiche la vitesse
display.print(" Vmax"); //en km/h
}
display.display(); //update de l'écran
}
}
// --=== si le capteur ne détecte pas l'aimant ===--
else{
etat_capt = 0; //on met la variable pour détecter l'entré de l'aimant à 0
}
}
// --------------------==================== Ecran 4 : distance ====================--------------------
if(Etat_BP == 4){
if (affichage == 1){
Serial.println(" --------------- ");
Serial.println("écran 4 : distance");
affichage = 0;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détécter l'entrée de l'aimant
Serial.println("capteur detecté");
delais = millis() - temps; //délai entre 2 tours en ms
//Serial.println(delais); //affichage temps en ms
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on passe à "en mouvement"
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
/*Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en m/s");*/
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse dans le moniteur série =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moyenne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
// ---==== calcul distance ====---
distance = nbr_tour * Proue; //la distance en mètre
distance = distance / 1000; //la distance en km
display.clearDisplay();
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
display.print(distance);
display.print(" km");
display.display();
}
}
else{
etat_capt = 0; //on met la variable pour detecter l'entrée de l'aimant à 0
}
}
// --------------------==================== Ecran 5 : pollution ====================--------------------
if(Etat_BP == 5){
if (affichage == 0){
Serial.println(" --------------- ");
Serial.println("écran 5 : pollution");
affichage = 1;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détécter l'entrée de l'aimant
Serial.println("capteur detecté");
delais = millis() - temps; //délai entre 2 tours en ms
//Serial.println(delais); //affichage temps en ms
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on passe à "en mouvement"
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
/*Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en m/s");*/
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse dans le moniteur série =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moyenne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
display.clearDisplay();
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
display.print("pollution");
display.display();
}
}
else{
etat_capt = 0; //on met la variable pour detecter l'entrée de l'aimant à 0
}
}
}