70h long project
On my last year STI2D of high school we work, in team, choose a system to improve. This project was evaluated at Baccalauréat coefficient 12.
On my last year STI2D of high school we work, in team, choose a system to improve. This project was evaluated at Baccalauréat coefficient 12.
For this project we have chosen to add three systems on the bike with Arduino type card:

In this project, I have work on a speedometer and this display.
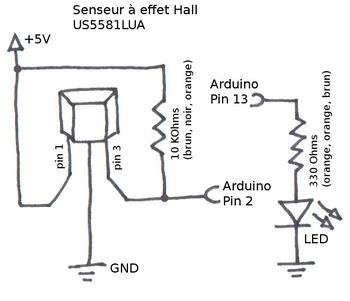
For the speedometer i have use a hall effect sensor (sensor of magnetic field).
I have fix a senor on a fork and a magnet on the wheel witch allows me to detect a turn of wheel.
At every turn of wheel I run stopwatch to optain the time between 2 turn.
Then I calculate the speed with a formula:
perimeter of the wheel / time between .
For display, I have use one OLED 0.96 screen fix on the handlebars with a connexion on I2C.
For the micro controller I have use one ESP8266 because to send data of pollution on a server we need a WI-FI chip. On ESP8266 this chip is integrate on the card.
To make a speedometer we need:


// ----------========== Partie déclarative ===========----------
// -----===== calcul du délai =====-----
float delais;
float temps;
int tempoV = 0;
// -----===== calcul de la vitesse =====-----
int etat_capt = 0;
float vitesse;
float moyV = 0;
float sommeV = 0;
int compteur = 1;
int arreter = 0;
// -----===== capteur =====-----
int capteur_hall = D4; //capteur sur la pin digital 8
// -----===== roue =====-----
const float pi = 3.14; //pi est egale a 3.14
const int Droue = 24; //le diamètre de la roue en pouce
float Proue; //le périmètre de la roue
// ----------========== Partie SETUP ===========----------
void setup(){
pinMode(capteur_hall, INPUT); //le capteur en entrée
Serial.begin(115200);
// -----===== calcul périmètre roue =====-----
Proue = ((Droue * 2.54) * pi)/100; //périmètre de la roue en m
Serial.print("périmetre de la roue : ");
Serial.print(Proue);
Serial.println(" mètre");
}
// ----------========== Partie code (LOOP) ===========----------
void loop(){
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détécter l'aimant
delais = millis() - temps; //temps en ms
Serial.println(delais);
temps = millis();
etat_capt = 1;
arreter = 0;
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
// -----===== calcul de la moyenne =====-----
sommeV = sommeV + vitesse;
moyV = sommeV / compteur;
compteur++;
// -----===== affichage vitesse =====-----
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moy : ");
Serial.print(moyV);
Serial.println(" en km/h");
}
}
// ---== en cas d'arrêt ==---
else{
etat_capt = 0;
if(arreter == 0){
if((millis() - temps) >= 5000){
Serial.println ("vitesse : 0km/h ");
arreter = 1; }
}
}
}
// -------======== Déclaration de bibliothèque ========-------
#include
#include
// adresse de l'écran OLED
#define OLED_ADDR 0x3C
Adafruit_SSD1306 display(-1);
#if (SSD1306_LCDHEIGHT != 64)
//#error("largeur incorrect, fix Adafruit_SSD1306.h!");
#endif
void setup() {
// Initialisation de l'écran
display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDR);
display.clearDisplay();
display.display();
display.setTextSize(2); //taille du texte à 1
display.setTextColor(WHITE); //couleur blanche
}
void loop() {
display.clearDisplay(); //on efface l'écran
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
display.print("Hello world"); //on affiche "Hello world"
display.display(); //update de l'écran
}
// -------======== Déclaration de bibliothèque ========-------
#include
#include
// adresse de l'écran OLED
#define OLED_ADDR 0x3C
Adafruit_SSD1306 display(-1);
#if (SSD1306_LCDHEIGHT != 64)
//#error("largeur incorrect, fix Adafruit_SSD1306.h!");
#endif
// -------======== Déclaration de Variable/capteur ========-------
// -----===== calcul delais =====-----
float delais;
float temps;
// -----===== calcul vitesse =====-----
int etat_capt = 0;
float vitesse;
float moyV = 0;
float Vmax = 0;
float sommeV = 0;
int compteur = 1;
int arreter = 0;
int nbr_tour = 0;
float distance = 0;
// -----===== Bouton =====-----
int BP = D3; //bouton sur la pin digital 7
int Etat_BP = 1; //variable pour savoir sur quel écran on est
int nbr_ecran = 5; //pour définir le nombre d'écran
int affichage = 0;
// -----===== capteur =====-----
int capteur_hall = D4; //capteur sur la pin digital 8
// -----===== roue =====-----
const float pi = 3.14; //pi est egal a 3.14
const int Droue = 15; //le diamètre de la roue en pouce
float Proue; //le périmètre de la roue
void setup() {
// ----------------======================= SET UP =======================---------------
Serial.begin(115200); //lancement du moniteur série à 115 200 baud
Serial.println(" ----- SET UP -----");
// initialisation de l'écran
display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDR);
display.clearDisplay();
display.display();
display.setTextSize(2); //taille du texte à 1
display.setTextColor(WHITE); //couleur blanche
// afficher un pixel à chaque coin de l'écran
/*display.drawPixel(0, 0, WHITE);
display.drawPixel(127, 0, WHITE);
display.drawPixel(0, 32, WHITE);
display.drawPixel(127, 32, WHITE);*/
pinMode(capteur_hall, INPUT); //le capteur est en entrée
pinMode(BP, INPUT); //le bouton est en entrée
// -----===== calcul périmètre roue =====-----
Proue = ((Droue * 2.54) * pi)/100; //périmètre de la roue en m
Serial.print("périmetre de la roue : "); //affichage dans le moniteur série
Serial.print(Proue);
Serial.println(" mètre");
Serial.println(" ----- fin SET UP ----- ");
}
void loop() {
// ----------------======================= LOOP =======================----------------
// -----===== changement d'écran =====-----
if(Etat_BP <= nbr_ecran){
if(digitalRead(BP) == 0){
Etat_BP++;
//Serial.print("Etat bouton ");
//Serial.println(Etat_BP);
delay(250);
}}
else{
Etat_BP = 1;
}
// --------------------==================== Ecran 1 : vitesse ====================--------------------
if(Etat_BP == 1){
if (affichage == 0){
Serial.println(" --------------- ");
Serial.println("écran 1 : vitesse actuelle");
affichage = 1;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détecter l'entrée de l'aimant
delais = millis() - temps; //délai entre 2 tours en ms
//Serial.println(delais); //affichage du temps en ms
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on met la variable "arrêter" à 0
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
// -----===== calcul de la moyenne =====-----
sommeV = sommeV + vitesse; //on calcule la somme de toutes les vitesses
moyV = sommeV / compteur; //et on divise par la somme des tours de roue
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse dans le moniteur série =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moyenne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
// -----===== affichage écran =====-----
display.clearDisplay(); //on efface l'écran
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
if(vitesse >=10){
display.print(vitesse); //on affiche la vitesse
display.print(" km/h"); //en km/h
}
if(vitesse < 10){
display.print(vitesse); //on affiche la vitesse
display.print(" km/h"); //en km/h
}
display.display(); //update de l'écran
}
}
// --=== si le capteur ne détecte pas l'aimant (la roue ne tourne pas) ===--
else{
//Serial.println("capteur plus detecté");
etat_capt = 0; //on met la variable pour détecter l'entrée de l'aimant à 0
if(arreter == 0){ //si on n'est pas déjà arrêté
if((millis() - temps) >= 3000){ //si le capteur n'a rien détecté depuis x secondes
Serial.println ("vitesse : 0km/h ");
arreter = 1; //on passe à arrêter
vitesse = 0; //et on met la vitesse à 0
// --=== affiche la vitesse à l'arrêt ===--
display.clearDisplay();
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
display.print(vitesse);
display.print(" km/h");
display.display();
}
}
}
}
// --------------------=================== Ecran 2 : vitesse moyenne ====================--------------------
if(Etat_BP == 2){
if (affichage == 1){
Serial.println(" --------------- ");
Serial.println("écran 2 : vitesse moyenne");
affichage = 0;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //Pour détécter l'entrée de l'aimant
delais = millis() - temps; //temps en ms
//Serial.println(delais);
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on passe à "en mouvement"
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// ---==== calcul distance ====---
distance = nbr_tour * Proue; //la distance en mètre
distance = distance / 1000; //la distance en km
// -----===== calcul de la moyenne =====-----
moyV = distance / millis();
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moynne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
// -----===== affichage écran =====-----
display.clearDisplay(); //on efface l'écran
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
if(moyV >=10){
display.print(moyV); //on affiche la vitesse
display.print(" Vmoy"); //en km/h
}
if(moyV < 10){
display.print(moyV); //on affiche la vitesse
display.print(" Vmoy"); //en km/h
}
display.display(); //update de l'écran
}
}
// --=== si le capteur ne détecte pas l'aimant ===--
else{
etat_capt = 0; //on met la variable pour détecter l'entrée de l'aimant à 0
}
}
// --------------------==================== Ecran 3 : vitesse max ====================--------------------
if(Etat_BP == 3){
if(affichage == 0){
Serial.println(" --------------- ");
Serial.println("écran 3 : vitesse max");
affichage = 1;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détécter l'entrée de l'aimant
delais = millis() - temps; //délai entre 2 tours en ms
//Serial.println(delais); //affichage temps en ms
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on passe à "en mouvement"
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
/*Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en m/s");*/
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse dans le moniteur série =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moyenne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
// -----===== affichage écran =====-----
display.clearDisplay(); //on efface l'écran
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
if(Vmax >=10){
display.print(Vmax); //on affiche la vitesse
display.print(" VMax"); //en km/h
}
if(Vmax < 10){
display.print(Vmax); //on affiche la vitesse
display.print(" Vmax"); //en km/h
}
display.display(); //update de l'écran
}
}
// --=== si le capteur ne détecte pas l'aimant ===--
else{
etat_capt = 0; //on met la variable pour détecter l'entré de l'aimant à 0
}
}
// --------------------==================== Ecran 4 : distance ====================--------------------
if(Etat_BP == 4){
if (affichage == 1){
Serial.println(" --------------- ");
Serial.println("écran 4 : distance");
affichage = 0;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détécter l'entrée de l'aimant
Serial.println("capteur detecté");
delais = millis() - temps; //délai entre 2 tours en ms
//Serial.println(delais); //affichage temps en ms
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on passe à "en mouvement"
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
/*Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en m/s");*/
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse dans le moniteur série =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moyenne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
// ---==== calcul distance ====---
distance = nbr_tour * Proue; //la distance en mètre
distance = distance / 1000; //la distance en km
display.clearDisplay();
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
display.print(distance);
display.print(" km");
display.display();
}
}
else{
etat_capt = 0; //on met la variable pour detecter l'entrée de l'aimant à 0
}
}
// --------------------==================== Ecran 5 : pollution ====================--------------------
if(Etat_BP == 5){
if (affichage == 0){
Serial.println(" --------------- ");
Serial.println("écran 5 : pollution");
affichage = 1;
}
if(digitalRead(capteur_hall) == 0){
if(etat_capt == 0){ //pour détécter l'entrée de l'aimant
Serial.println("capteur detecté");
delais = millis() - temps; //délai entre 2 tours en ms
//Serial.println(delais); //affichage temps en ms
temps = millis();
etat_capt = 1; //le capteur est déjà là
arreter = 0; //on passe à "en mouvement"
// -----===== calcul de la vitesse =====-----
delais = delais / 1000; //temps en s
vitesse = Proue / delais; //vitesse en m/s
/*Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en m/s");*/
vitesse = (vitesse * 3600) / 1000; //vitesse en km/h
nbr_tour++; //on ajoute 1 au nombre de tours (pour calculer la moyenne et la distance)
// -----===== calcul de la vitesse max =====-----
if (vitesse > Vmax){
Vmax = vitesse;
}
// -----===== affichage vitesse dans le moniteur série =====-----
Serial.println("---------------");
Serial.print("vitesse : ");
Serial.print(vitesse);
Serial.println(" en km/h");
Serial.print("vitesse moyenne : ");
Serial.print(moyV);
Serial.println(" en km/h");
Serial.print("vitesse max : ");
Serial.print(Vmax);
Serial.println(" en km/h");
display.clearDisplay();
display.setCursor(1,9); //on met le curseur à 1 pixel du bord gauche et à 9 pixels du haut
display.print("pollution");
display.display();
}
}
else{
etat_capt = 0; //on met la variable pour detecter l'entrée de l'aimant à 0
}
}
}